A proof that TERRINet is a perfect opportunity also for senior scientists is Tadeusz Mikolajczik, Emeritus and Senior Lecturer at the University of Science and Technology (UTP) in Poland.
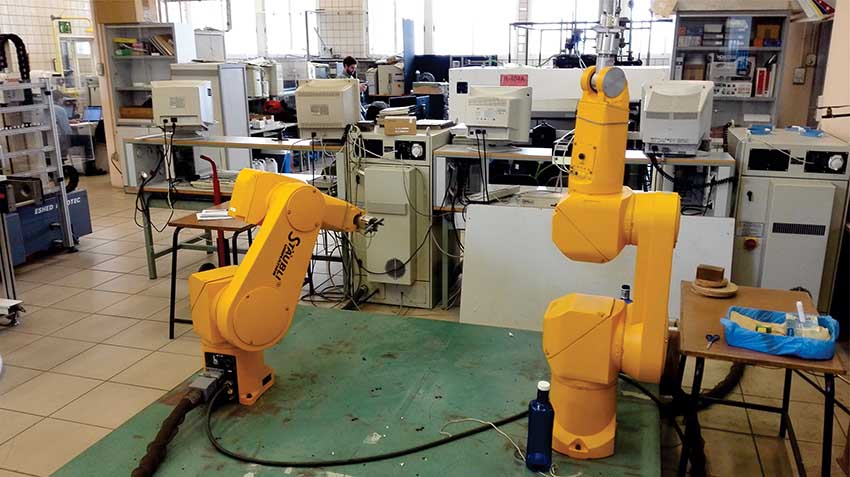
Tadeusz applied to TERRINet to determine possibilities and conditions for the transfer of his self-developed intelligent system for industrial robotic processing on a modern industrial robot, such as Staubli RX-90 equipped with Intel® RealSense ™ Depth Camera D435 camera.
The main scientific contribution of his system is the ability of a robot to automatically recognize and assess the surface of the unknown shape for robotic machining by the implementation of the vision system.
Staubli RX-90 is offered by TERRINet partner Robotic Vision and Control Group (GRVC) at the University of Sevilla (Sevilla, Spain), one of the leading specialists for robotic vision and aerial robotics.
THE INCORPORATION OF INDUSTRIAL ROBOT EQUIPED WITH A VISION TOOL INTO ROBOTIC MACHINING
The intelligent system for robotic machining of unknown shapes was previously developed for industrial robot IRb60, which was equipped with a special interface for computer controlling and perceiving the signals from various sensors.
The aim of the developed system was to be able to automatically determine the machining area and to evaluate the roughness of the surface of unknown shape.
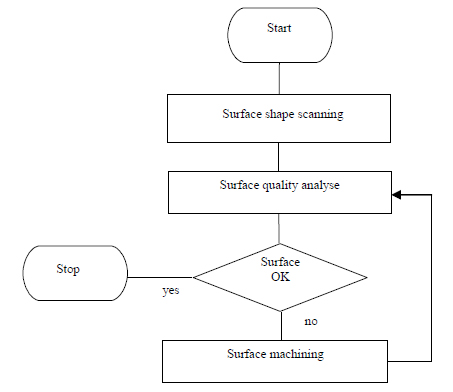
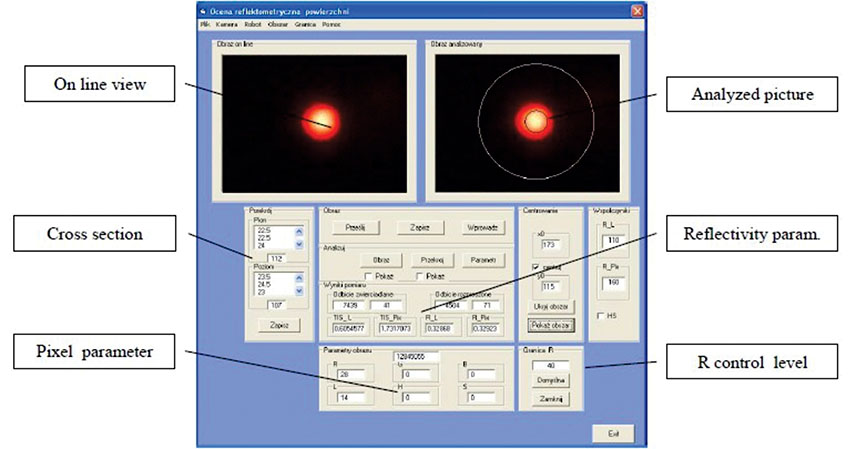
The surface shape recognition was performed by three different machining methods using a USB camera:
–direct image of the object in visible light, to verify the usage of an installed camera on the robot’s head by automatically determining the boundaries of the work area in surface finishing;
–light cross-section method, by the usage of robot’s light scanner design of 650 nm mounted in a special holder with a digital camera, determining the machining area coordinates perpendicular to the work surface;
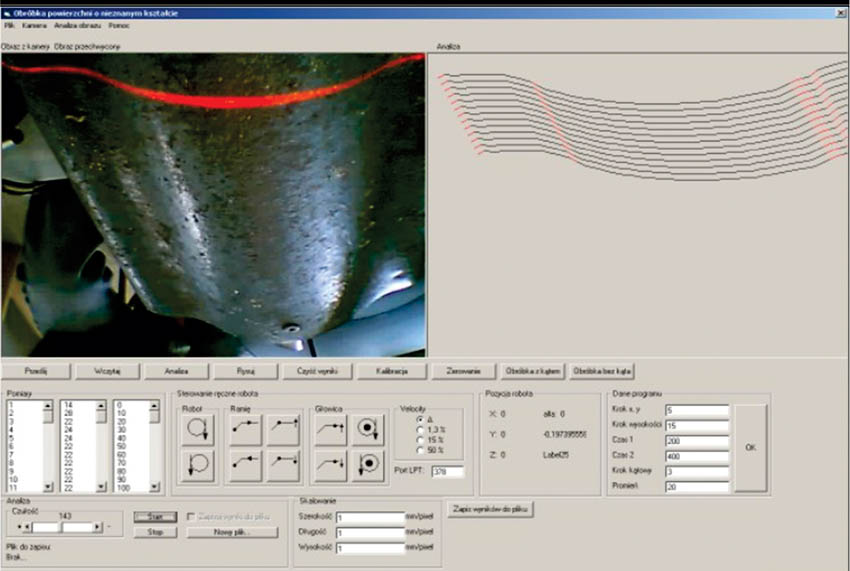
–the light diffusion image, produced by the laser beam (650 nm) reflection from the actual surface to actively assess the surface quality.
The robot control and software were elaborated in VB6 on the Windows system.
THE INTELLIGENT SYSTEM TRANSFERED TO STAUBLI RX-90 PLATFORM
For the TERRINet project, the machining surface shape recognition and automation of the machining process trajectory were conducted in RoboView software. Since the RX-90 robot has an open control system developed for Ubuntu on the Linux platform, the implementation of the elements of the developed intelligent system was possible.
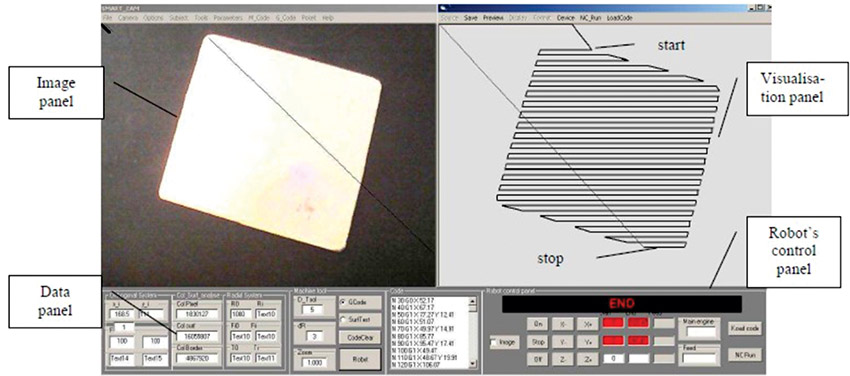
The main objective of the experiment on the Staubli RX-90 robot was to prepare an offline file for robot controlling, based on the indicated flat surface image processing (developed as RoboViewRX-90 software).
The RoboViewRX-90 software was generated from the image analysis of X, Y, Z parameters of the robot’s trajectory code, and A, B, C values of the head rotation. The coordinates for the machining surface were determined based on the image pixels analysis, whereas the trajectory tool was defined based on the tool diameter and federate.
As a result, a .txt control file was extracted and moved to the USB drive to control the RX-90 robot’s movement.

THE TESTS CONFIRMED THE USABILITY OF THE INTELLIGENT SYSTEM
Tests carried out on the RX-90 robot, confirmed the transferability of the intelligent system also in a modern industrial environment since the robot performance was consistent.
As a result of the experiment, the documentation of head geometry that determines the possibilities of attaching the sensors and tools for the machining surface recognition was elaborated.
UNVEILING NEW TECHNICAL POSSIBILITIES OF THE INDUSTRIAL ROBOTS AND VISION SYSTEM USAGE
The project opened further discussions and researches about the technical possibilities of the incorporation of industrial robots equipped with vision tools into surface treatments conducted by the intelligent systems for machining area recognition.
TERRINet TNA – THE OPPORTUNITY TO WORK WITH LEADING ROBOTIC EXPERTS
The TERRINet opportunity allowed Tadeusz to take a fresh look at his project. Which is even more important, allowed him to collaborate with one of the leading groups of experts for the vision systems.
He gained a lot of knowledge about the Staubli platform, innovative ways of incorporating the Intel® RealSense ™ Depth Camera D435 for image analysis and was able to use the automatically generated RX-90 robot control file.
Check www.terrinet.eu to see, how we can support you.
SUBMIT YOUR PROPOSAL HERE.